Схема слежения за солнцем сделай сам. Как самостоятельно собрать трекер для солнечной батареи
Канал “тяп-ляп” показал, как сделать самодельный солнечный трекер для панелей. Они будут автоматически поворачивается вслед за солнцем, увеличивая КПД энергетической установки.
Понадобятся две солнечные батареи мощностью по по 3,5 ватт. На на выходе у одной более 6 вольт, что при последовательном соединении двух батарей даст более 12 вольт. На обратной стороне USB гнездо. Три выхода из трех сегментов батареи. Каждый из которых генерируют по 2 вольта. То есть при необходимости можно подключиться соответствующим образом и получить 2, 4, 6 вольт.

Следующий важный узел – два сервопривода. Один будет поворачивать солнечную батарею по горизонтальной оси, а другой по вертикальной. Эти приводы непростые, их не так просто заставить вращаться. Необходима некоторая доработка. В наборе с каждым из двигателей идут пластиковые крестовины, диски, винты для крепления. Для двигателя приобретённые кронштейны. Также в наборе крепежные винты, подшипник и диски. Контроллер заряда. Он будет принимать энергию от солнечных батарей и передавать её в аккумулятор.
Начнем работу своими руками с электронной начинки. Схема трекера для солнечной панели ниже. Электрическая схема, плата, программа для редактирования платы: https://cloud.mail.ru/public/DbmZ/5NBCG4vsJ
Электрическая схема, плата, программа для редактирования платы: https://cloud.mail.ru/public/DbmZ/5NBCG4vsJ
Схема очень простая и легкая для повторения. Она наиболее удачная из нескольких проверенных вариантов. Но даже ей автору пришлось немножко изменить. Пришлось изменить номиналы переменных и постоянных резисторов, была спроектирована схема печатной платы.
Для начала распечатаем схему печатной платы трекера на специальной бумаге. Это лазерно-утюжная технология. Бумага имеет глянцевый вид. С обратной стороны она обычная матовая. Печатать нужно на лазерном принтере на глянцевой стороне. После контакта с утюгом надо дать остыть и бумага легко отрывается от слоя.

Перед переносом текстолит обязательно нужно обезжирить. Лучше всего использовать мелкую наждачную бумагу. Прикладываем рисунок к плате и проглаживаем горячим утюгом 2 минуты.
Теперь нужно вытравить плату трекера. Можно использовать персульфат аммония. Продается в магазинах радиотоваров. Один и тот же раствор можно использовать несколько раз. Желательно перед применением подогрев жидкости до 45 градусов. Это сильно ускорит процесс травления. Через 20 минут правление успешно завершилось. Теперь нужно снять тонер. Опять используем наждачку или ацетон.
Теперь можно проделать отверстие в плате. Можно приступать к пайке деталей.
Сердце солнечного трекера – операционный усилитель lm324n. Два транзистора типа 41c, типа 42c. Один керамический конденсатор 104. Многие детали автор разработки заменил на smd тип. Вместо диодов 5408 использованные их аналоги smd типа. Главное использовать не менее 3 ампер. Один резистор на 15 килоом, 1 на 47 килоом. Два фоторезистора. 2 подстроечных резисторов на 100 и 10 килоом. Последний отвечает за чувствительность фото датчика.
Устройство слежения за солнцем для солнечных панелей – гелиостат
 Гелиостат, или по другому, трекер – это такое устройство для слежения за солнцем, в нашем случае для поворота солнечных панелей, что бы они всегда были перпендикулярно солнцу. Ведь не секрет, что именно в таком случае солнечная панель отдаёт максимальную мощность. На схеме вверху устройство для слежения за солнцем (гелиостат) использует импульсное регулирование и без всякой помощи человека способно ориентировать солнечную батарею по наилучшей освещенности.
Гелиостат, или по другому, трекер – это такое устройство для слежения за солнцем, в нашем случае для поворота солнечных панелей, что бы они всегда были перпендикулярно солнцу. Ведь не секрет, что именно в таком случае солнечная панель отдаёт максимальную мощность. На схеме вверху устройство для слежения за солнцем (гелиостат) использует импульсное регулирование и без всякой помощи человека способно ориентировать солнечную батарею по наилучшей освещенности.
Схема гелиостата состоит из тактового генератора (DD1.1, DD1.2), двух интегрирующих цепей (VD1R2C2, VD2R3C3), такого же числа формирователей (DD1.3, DD1.4), цифрового компаратора (DD2), двух инверторов (DD1.5, DD1.6) и транзисторного коммутатора (VT1-VT6) направления вращения электродвигателя М1, управляющего поворотом платформы, на которой установлена солнечная батарея. С поступлением питания генератор на элементах DD1.1, DD1.2 вырабатывает тактовые импульсы, следующие с частотой около 300 Гц. При работе устройства сравниваются длительности импульсов, сформированных инверторами DD1.3, DD1.4 и интегрирующими цепями VD1R2C2, VD2R3C3. Их крутизна меняется в зависимости от постоянной времени интегрирования, которая, в свою очередь, зависит от освещенности фотодиодов VD1 и VD2 (ток зарядки конденсаторов С2 и СЗ пропорционален их освещенности). Сигналы с выходов интегрирующих цепей поступают на формирователи уровня DD1.3, DD1.4 и далее - на цифровой компаратор, выполненный на элементах микросхемы DD2. В зависимости от соотношения длительностей импульсов, поступающих на входы компаратора, сигнал низкого уровня появляется на выходе элемента DD2.3 (вывод 11) или DD2.4 (вывод 4). При равной освещенности фотодиодов на обоих выходах компаратора присутствуют сигналы высокого уровня. Инверторы DD1.5 и DD1.6 необходимы для управления транзисторами VT1 и VT2. Высокий уровень сигнала на выходе первого инвертора открывает транзистор VT1, на выходе второго - VT2. Нагрузками этих транзисторов являются ключи на мощных транзисторах VT3, VT6 и VT4, VT5, которые коммутируют напряжение питания электродвигателя М1. Цепи R4C4R6 и R5C5R7 сглаживают пульсации на базах управляющих транзисторов VT1 HVT2. Направление вращения двигателя меняется в зависимости от полярности подключения к источнику питания. Цифровой компаратор не позволяет одновременно открыться всем ключевым транзисторам, и, таким образом, обеспечивает высокую надежность системы.
Утром с восходом солнца освещенность фотодиодов VD1 и VD2 окажется различной, и электродвигатель начнет поворачивать солнечную батарею с запада на восток. По мере уменьшения разницы в длительностях импульсов формирователей, будет уменьшаться длительность результирующего импульса, и скорость поворота солнечной батареи плавно будет замедляться, что обеспечит ее точное позиционирование на солнце. Таким образом, при импульсном управлении вращение вала электродвигателя можно передавать платформе с солнечной батареей непосредственно, без применения редуктора. В течение дня платформа с солнечной панелью будет поворачиваться за движением солнца. С наступлением сумерек длительности импульсов на входе цифрового компаратора окажутся одинаковыми, и система перейдет в дежурный режим. В этом состоянии потребляемый устройством ток не превышает 1,2 мА (в режиме ориентации он зависит от мощности двигателя).
Если дополнить конструкцию блоком вертикального отклонения, собранным по аналогичной схеме, можно полностью автоматизировать ориентацию батареи в обеих плоскостях. Если вдруг указанных на схеме микросхем не оказалось, их можно заменить на микросхемы серий К564, К176 (при напряжении питания 5…12 В). Транзисторы КТ315А заменимы любыми из серий КТ201, КТ315, КТ342, КТ3102, а КТ814А - любыми из серий КТ814, КТ816, КТ818, а также германиевыми П213-П215, П217. В последнем случае между эмиттерами и базами транзисторов VT3- VT6 следует включить резисторы сопротивлением 1…10 кОм, чтобы предотвратить их случайное открывание вследствие значительного обратного тока. Вместо фотодиодов ФД256 можно поставить кусочки от солнечных элементов (включенные с соблюдением полярности), фототранзисторы без цепей смещения, а также фоторезисторы, например, СФ2, СФЗ или ФСК любой модификации. Следует только подобрать (изменением сопротивления резистора R1) частоту тактового генератора по надежному срабатыванию цифрового компаратора. Для защиты фотодиодов от избыточного облучения применен зеленый светофильтр. Между фото датчиками помещают непрозрачную шторку. Ее закрепляют перпендикулярно плате с таким расчетом, чтобы при изменении угла освещения она затеняла один из фотодиодов. 
В наше время солнечные элементы и солнечные батареи часто используются как источники питания. Но солнечные панели производят гораздо больше энергии, если они направлены прямо на солнце все время, чем тогда, когда они находятся в фиксированном положении. Для этого нужен солнечный трекер – поворотный механизм, который меняет положение солнечной батареи в соответствии с положением солнца.
Этот материал является свободным переводом страницы Майка Дэвиса (Mike Davis) об изготовлении солнечного трекера своими руками. Майк Дэвис рассказывает.
Изготовить солнечный трекер своими руками можно. Вы тоже можете это сделать.
Вот мои солнечные батареи на солнечном трекере, для изготовления которого я использовал старый антенный ротатор, купленный мной за 15 $.

Вот коробка из-под антенного ротатора. Коробка потертая, но ротатор внутри был еще новый и завернутый в оригинальный пластик. Это старое изделие на основе технологий 1960-х годов. Человек купил блок новым, но никогда не использовал его. Он был в коробке в гараже в течение многих десятилетий, пока хозяин наконец решил избавиться от него и отдал в комиссионный магазин.
В основном я просто выбросил почти всю электронику блока, сохранил только то, что имело отношение к приводу двигателя, и присоединил свою систему управления. Подробнее об этом будет речь ниже.
Прежде всего нужно было придумать способ крепления приводного двигателя и солнечной батареи. Я решил сделать систему слежения, которая была бы простой, недорогой, и легко разбиралась для транспортировки. Это было сделано в основном из деревянных брусков 2×4 и стандартных фитингов, скрепленных болтами.
Конструкция солнечного трекера

Это устройство было разработано, чтобы быть портативным: легко разбираться и легко снова собираться с помощью нескольких инструментов. Ядро блока состоит всего из пяти основных частей: северная боковина, южная, вращающийся узел, и две скобки, чтобы держать все вместе.
Перед использованием в естественных условиях базовый блок трекера будет выровненным по оси восток-запад и оси север-юг (с помощью компаса).

Вот фото северной боковой стороны трекера солнечных батарей. Она имеет 48 дюймов в ширину у основания и 43 1/2 дюйма в высоту. Имейте в виду, что эти размеры правильны для использования на 34,6 градуса северной широты. Если вы значительно дальше на север или на юг, то вам нужно изменить размеры этой части. Подробнее об этом ниже. Боковина изготовлена из брусков 2×4, нарезанных и склеенных. Обратите внимание, что есть две маленькие ножки внизу. Они помогают выровнять устройство при его установке. Промежуток между вертикальными брусками 2×4 равен толщине бруска (около 1 1/2 дюйма).

Вот фото южной стороны трекера солнечных батарей. Эта сторона имеет 24 дюйма в ширину и 13 1/2 дюйма в высоту. Она также сделана из брусков 2×4, приклеенных и прикрученных. Эта часть также имеет маленькие ножки, чтобы помочь в выравнивании всего блока при установке. Эта часть, вероятно, является более или менее универсальной и будет работать на разных широтах. Опять же, зазор между вертикальными брусками 2×4 равный толщине бруска 2×4 (примерно 1 1/2 дюйма).

Горизонтальная скоба 2х4, которая соединяет нижнюю часть северной боковины солнечного трекера с нижней частью южной боковины, составляет 48 дюймов в длину. Оно вписывается между стойками и крепится болтами через них. Это также нужно будет рассчитывать на вашей конкретной широте, так как расстояние между северной и южной опорами изменится при изменении угла оси север-юг.
Раскос (кусок 1×4) было добавлен, чтобы взять большую часть нагрузки от вращающегося узла (установлен на болты, удерживающие вращающийся узел на месте).

Вот сердце трекера солнечных батарей. Это приводной двигатель и вращающийся узел. Антенна двигателя и связанные с ним монтажные конструкции находятся слева. Однодюймовая стальная труба 4 фута длиной приводится в движение ротатором и будет нести солнечные батареи. Подшипники и крепления конструкции находятся на правом торце. Подробности ниже.

Показан двигатель крупным планом. Этот антенный ротатор предназначен быть закрепленным на неподвижной мачте и вращать более короткую мачту с антенной, прикрепленной к ней. Так что я создал псевдо фиксированную мачту, чтобы прикрепить его. Короткий кусок трубы в 1 дюйм вверху (под проводом) служит точкой крепления для ротатора. Короткий отрезок трубы крепится фланцем, который, в свою очередь, прикреплен болтами к 3 1/2 х 3 1/2 дюйма квадратного куска дерева, приклеенного прикрученного шурупами к куску бруска 2х4 в 12 дюймов длиной. Этот брусок 2х4 проходит между стойками северной боковины и удерживается на месте болтами.

Вот крупным планом показан подшипник на нижнем конце трубы длиной 4 фута, которая несет солнечные батареи. Переход сделан с помощью фланцев.
В первый раз, когда я собрал прибор, я зажал все части большими зажимами. Как только я получил правильный угол оси, зажимы были затянуты. Тогда я просверлил отверстия для длинных болтов, чтобы соединить все части вместе.
Я должен поговорить немного о том, как я определил угол оси (вращения трекера) север-юг. Устройство должно быть выставленным по широте местности, где будет эксплуатироваться. Я не делал его регулируемым. Это будет правильный угол весной и осенью, когда я обычно нахожусь на моей собственности. Это будет немного слишком высоко летом, и немного низко зимой. Тем не менее, солнечные батареи будут давать значительно больше энергии, чем тогда, когда они фиксированные.
Угол оси вращения относительно земли устанавливается в соответствии широте места, где будет использоваться солнечный трекер. Подумайте об этом таким образом. Если он был использован на экваторе, где широта 0, угол относительно земли будет 0, так что ось будет горизонтальной. При использовании на одном из полюсов, 90 или -90 градусов широты, угол относительно земли будет вертикальным. Из этого следует, что правильный угол всегда соответствует широте места, где трекер будет эксплуатироваться. Мой участок земли имеет около 34,6 градуса северной широты, так что этот угол я использовал.
Итак, ваш угол, может отличаться, но и размеры вашей базовой конструкции также будут отличаться. Размеры основания зависят от используемого угла. И высота вашей северной и южной сторон, и расстояние между южной и северной боковинами должны быть рассчитаны.
Регулируемые версии конструкции могут быть легко созданы, они позволят выставлять ниже угол летом и более высокий угол в зимний период. Однако пока я оставлю это в качестве упражнения для читателя, меня пока устраивает то, что есть.

Вот еще одна фотография установленной головки ротатора.

Эта фотография показывает, как нижний конец подшипника приводной трубы вписывается в южную боковину и удерживается болтами. Другой конец прикреплен к северной боковине. Нижний конец диагональной скобки также виден.

Вот крупным планом показано, как подшипник крепится с помощью фитингов.

Эта фотография показывает одну из алюминиевых рам, которые на трекере держат солнечные батареи. Она сделана из алюминиевого уголка, содержит 100W панель, и имеет 47 1/8 на 21 1/2 дюйма внутренних размеров. В основном, это немного больше, чем внешние размеры панели солнечных батарей. Панель фиксируется на месте с помощью винтов, которые проходят через рамки в стороны панели.
Можно увидеть надрезы в рамке для монтажа на трубу трекера.

Эта фотография показывает, как рама соединена по углам (сварка углов также возможна).

Вот крупным планом надрезы в раме для монтажа на трубу трекера. Выемки такой же глубины, что и хомуты, используемые для монтажа.

Вот крупным планом показано, как хомуты используются для крепления рамы на трубу трекера. Хомут действительно довольно плотно крепит раму на трубу. Я был удивлен тем, как хорошо он работал.

Во время первого тестирования в помещении я установил продольно только одну солнечную батарею на всю приводную трубу (в конечном варианте должен был установить две батареи). Если у вас есть или нужна только одна батарея, это способ установить ее.

Эта фотография показывает две алюминиевые рамы, зажатые на приводной трубе.

Эта фотография показывает две солнечные батареи на трекере. Винты удерживают батареи на месте, так что ветер не может сдуть их из рам.
Верхняя панель является коммерческой, этот 100 Вт блок я купил, потому что получил действительно очень большую скидку на него. Нижняя панель является одной из моих самодельных 60-ваттных солнечных панелей. Перейдите по ссылке, чтобы увидеть, как я делаю их.
160 Вт могут показаться не слишком мощными, но мои потребности в электроэнергии минимальны. Трекер и мой самодельный ветрогенератор дополняют друг друга, мои батареи сохраняют заряд и у меня есть достаточно электроэнергии.

Эта фотография показывает трубу противовеса. Это кусок дюймовой стальной трубы 30 дюймов длиной. Она ввинчивается в уголок на верхнем конце блока двигателя. Одна труба – больший противовес, чем нужно для одной панели. Для двух панелей я добавил стальной T-образный фитинг на конце трубы. Антенный ротатор был разработан, чтобы двигаться сбалансировано относительно вертикальной мачты. Противовесом уменьшается величина крутящего момента, который двигатель должен предоставлять для перемещения панелей, подвешенных почти горизонтально относительно мачты. Ваши панели, вероятно, имеют разный вес, и требуется различное расположение противовеса. Поэкспериментируйте с различными длинами труб и/или дополнительных фитингов, чтобы получить баланс ближе к идеалу, насколько это возможно, и предотвратить перегрузку двигателя или передач.
Для продолжения щелкните на кнопке с цифрой 2
Блок управления солнечного трекера

Вот оригинал принципиальной схемы антенного ротатора. Все абсолютно электромеханическое. Очень старая школа, почти примитивно. С другой стороны, он по-прежнему работает после десятилетий хранения. Одной из особенностей этого старого блока является то, что двигатель, вращающий головки, работает на 24 В переменного тока. Это сделало проектировании новой системы управления для него сложным. Я искал способы для изменения или автоматизации оригинального блока управления, но не мог придумать, как заставить ее работать. Поэтому я отказался от намерения использовать прежнее управление, разобрал его на части, и началось проектирование нового.
Я не смог повторно использовать многие из этих частей. Фактически головка ротатора используется. Но от блока управления я сохранил только трансформатор с 120V до 24V (# 110), и мотор конденсатор (# 107).

Вот схема контроллера электроники, которую я придумал после нескольких испытаний. Полноразмерная схема здесь. Схема основана на MBED, платформе быстрого прототипирования. Модуль MBED может быть запрограммирован на C с помощью онлайн IDE. MBED является достаточно мощным, есть множество возможностей IO. Это действительно слишком для этого проекта, но я был знаком с MBEDs, поскольку использовал их в проектах на работе. Вы можете легко заменить его на Arduino, Raspberry Pi, или другое, чтобы сделать то же самое.
Сердцем схемы является MBED. Он считывает значение напряжения (с помощью двух своих аналоговых входов) из двух небольших солнечных батарей, установленных под прямым углом друг к другу. Двигатель ротатора антенны перемещается так, что поддерживает напряжение от двух солнечных батарей почти равным, держа их направленными на солнце.
На двигатель подают энергию путем закрытия реле и включения инвертора переменного тока. Направление вращения двигателя регулируется другим реле. Я использовал 40 А автомобильные реле, потому что они дешевы, доступны везде, и у меня уже было несколько на руках. Реле возбуждается силовыми транзисторами TIP120 Дарлингтона управляемыми выходными линиями от MBED. Две кнопки были добавлены для ручного перемещения двигателя при тестировании и для устранения неисправностей. Нажатие PB1 перемещает двигатель на запад. Нажатие PB1 и PB2 вместе перемещает двигатель на восток.
Два конечные выключатели соединены с входными линиями MBED. Движение начинается только в заданном направлении, если конечный выключатель замкнут. Движение останавливается через прерывания, если конечные выключатели открыты.
Регулятор LM7809 с + 9В обеспечивает стабильное питание для MBED от источника 12В. MBED основано на логике 3,3, и имеет регулятор на борту и выходные линии на 3,3, для согласования использованы резисторы.
Список деталей блока управления солнечного трекера
C3 – NPО (взял из оригинальной коробки управления)
D1-D2 – 1N4001 или аналогичные диоды
ECell-WCell – тонкопленочные медь-индий-селенид (CIS) солнечные элементы
F1 – 2A инерционный предохранитель
IC1 – LM7809 + 9В регулятор напряжения
IC2 – NXP LPC1768 MBED
K1-K2 – 40A SPDT Bosch Automotive тип реле
LS1-LS2 – быстродействующий контакт NC коммутатор (см. ниже)
PB1-PB2 – быстродействующий контакт NO кнопки
Q1-Q2 – TIP120 NPN силовой транзистор Дарлингтона
R1-R6 – 1к 1/8 Вт резисторы
R7-R8 – 10K Trimpots
T1 – 120VAC к 24VAC 2A понижающий трансформатор
Инвертор AC – 200-250 Вт 12В постоянного тока до 120В переменного тока инвертор
Код (программное обеспечение) для этого проекта можно найти на http://mbed.org/users/omegageek64/code/suntracker/. Это достаточно простая программа. Как я уже сказал выше, MBED является чрезмерным для этого проекта. Однако его неиспользованный потенциал мог бы позволить добавляться новые функции в будущем (можно добавить вторую моторизованную ось, можно было бы добавить контроль заряда и температурную компенсацию).

Электроника блока управления расположена в старом ящике от боеприпасов, который я приобрел в комиссионном за $ 5 Это идеальный корпус, крепкий, защищенный от непогоды и просторный. В нем есть два 40 Amp автомобильных реле, инвертор, 120В / 24В понижающий трансформатор, макет, содержащий логику повода, держатель предохранителя и клеммные колодки для проводки.
Эта фотография была сделана на самом раннем этапе проекта солнечного трекера с ранней версией электроники на нем. Небольшой инвертор 100W, показанный на фото, был позже заменен более надежным. Маленький инвертор работал, но я считал, что это было слабое место. Поэтому я купил большой на 250W. Двигатель после этого перемещается быстрее и плавнее, не слышны странные звуки, словно от умирающего животного.

Здесь я начал монтаж электроники внутри ящика для патронов. Реле, трансформатор, клеммная колодка и одна из полос клемм были установлены.
Хотя, похоже, электроника солнечного трекера является последней вещью, о которой нужно говорить на этой веб-странице, она на самом деле была одной из первых вещей, над которыми я начал работать после приобретения антенного ротатора. Электроника прошла несколько различных версий, прежде чем я остановился на окончательном варианте.

Вот вид внутри коробки из-под патронов со всеми установленными компонентами электроники. Белый макет со всей логикой в правом верхнем углу. Длинный черный прямоугольник является инвертором. Макет и инвертор удерживаются на месте липучкой промышленной прочности.
Приглядевшись, вы увидите, что кабель USB подключен к модулю MBED на плате и идет к моему нетбуку, едва заметному в верхней части фото. Эта фотография была сделана во время программирования/ тестирования/наладки приводной электроники.

Вот крупным планом плата с «мозгами» системы на ней. MBED компьютерный модуль находится справа. Слева от MBED есть два trimpots для регулирования сигналов от сенсорной головки. Ниже них силовые транзисторы для управления реле. Далее слева есть ручные кнопки коррекции (нажимаются для перемещения трекера вручную). В крайнем левом углу есть регулятор напряжения 9В.
Макет временный. Впоследствии я сделаю правильный печатную плату и установить ее.

Головка датчика состоит из двух небольших тонкопленочных Copper Indium di Selenide (CIS) солнечных элементов того же типа, который я использовал в моей самодельной складной 15-ваттной солнечной батарее. У меня осталось неиспользованными несколько таких элементов.

Два небольшие солнечные элементы установлены под углом 90 градусов по отношению друг к другу. Идея заключалась в том, что, когда один элемент или другой будут получать больше солнца, солнечный трекер будет двигаться, пока освещенность не выровняется.

Здесь показан вид законченной сенсорной головки солнечного трекера. Она установлена на короткий кусок алюминиевой трубки, которая, в свою очередь, будет установлена на приводе трубы слежения. Я показал некоторые размеры для тех, кто всегда просит меня, чтобы включить их. Головка датчика крепится хомутом.

Вот вид головки датчика, прикрепленного к солнечному трекеру. Она устанавливается на трубу, выходящую из верхней части поворотного устройства.

Два конечные выключатели установлены на алюминиевый уголок, прикрепленный к приводной трубе хомутом таким же образом, как и солнечные панели.

Лопатки переключателей контактируют с управляющими длинными винтами, выступающими из деревянной несущей конструкции приводного двигателя. Конечные выключатели останавливают движение электродвигателя с обоих (восточного и западного) концов хода. Переключатели нормально закрыты, и открываются, когда граница перемещения будет достигнута.
Тестирование, настройка и доработка солнечного трекера

Эта фотография была сделана во время сеанса отладки в моей мастерской в последние выходные перед отъездом в Аризону. Мой нетбук подключен к MBED блока управления. Батарея большая, глубокого цикла, обеспечивает питание электроники и блок трекера (нет в кадре).

Еще одна фотография тестирования и отладки блока управления. Датчик работал хорошо в помещении моей мастерской.
После этого, уже в Аризоне, была обнаружена проблема. Гораздо более сильный естественный солнечный свет питал солнечные элементы датчика, даже если они были под достаточно острым углом к солнцу. Это привело к тому, что трекер не следил за солнцем с нужной точностью.

Решение проблемы было найдено путем установки панели затемнения перед солнечными элементами и использованием черной изоленты для покрытия части солнечных элементов.
Это первый вариант панели затемнения, кусок металла вырезали из алюминиевой банки безалкогольного напитка, единственного тонкого листового металла, который был у меня на руках в то время.

Прототип панели затемнения работал так хорошо, что постоянная панель затемнения из 1/32 листа алюминия, купленного в хозяйственном магазине, была сделана на следующий день. Была сделана шире, чтобы она давала более широкую тень и я мог отказаться от изоленты на солнечных элементах.

Панель затемнения солнечного трекера установлена на двух винтах, которые позволяют ей поворачиваться на восток и запад. Это нужно для тонкой настройки точности наведения трекера. С этой панелью трекер действительно начал работать хорошо.
На фото вы видите, как в тени большая часть восточного элемента. Когда различие в выходе тока между элементами превысит определенный предел, трекер начнет двигаться.

Вот фото финальной версии крепления затемнения с размерами.

Панель затемнения прекрасно работает. Вот это фото сделано поздно днем, и солнечный трекер преодолел почти весь свой путь до заката. Устройство работает очень хорошо. Я не мог быть более довольным.
Калибровка трекера достаточно проста. В ясный день подключите портативный компьютер к модулю MBED в трекере, откройте приложение, чтобы увидеть информацию по MBED. Отрегулируйте панель затемнения, чтобы она находилась по центру. Вручную позиционирует трекер, чтобы он был направлен на Солнце, затем выключите инвертор, чтобы трекер не двигался самостоятельно. Отрегулируйте trimpots, пока показатели востока и запада не будут примерно равны Получите их как можно более близкими. Делайте довольно быстро, потому что солнце движется. Вы можете всегда вручную повторно центрировать трекер на солнце и попробовать еще раз. После того, как вы отрегулируете, включите инвертор и посмотрите, насколько хорошо трекер отслеживает движение солнца.
Поскольку Солнце движется медленно, калибровка может занять некоторое время. Возможно, вам придется ждать час или два, или даже большую часть дня для внесения корректировки.

Здесь трекер направлен немного восточнее центра в пасмурный день. Даже через тонкие облака трекер работает хорошо. Трекер перестает отслеживать солнце, когда облака густые и яркость неба, как правило, достаточно равномерная.
Эта фотография сделана во временя тестирования в Аризоне. Мой самодельный контроллер заряда и инвертор для питания 120В переменного тока подсоединены с помощью оранжевого удлинителя. Впоследствии батарея и электроника будут в защищенном корпусе, под землей будут провода для 120В переменного тока и 12В постоянного тока, дистанционный переключатель мощности для инвертора и вольтметр батареи будут установлены в салоне. Это есть в плане.
На моем участке земли в Аризоне ветрено. В любой день мы можем видеть порывы до 35 миль в час. Еще хуже, если начинается буря. Эта фотография показывает деревянные колья на четырех углах базы солнечного трекера, чтобы удерживать его на месте. После того, как я решу, где на постоянно разместить трекер, я, вероятно, буду использовать стальные колышки, чтобы удерживать его на месте (они не будут гнить в земле).

UPDATE – Мне кажется, я нашел дешевый и легкий способ сделать всепогодной головку датчика. Я разрезал бутылку 2 литра пополам и положил ее на головку датчика. Пришлось сделать несколько прорезей в нижней части бутылки, чтобы она скользила вокруг квадратной трубы в нижней части головы. Я могу отрегулировать положение панели затемнения (при необходимости) через крышку отверстия.

UPDATE – Я сделал некоторые изменения в солнечном трекере. Во-первых, как вы можете видеть на этой фотографии, он был окрашен, чтобы защитить древесину от погоды. Он также в настоящее время установлен на кирпич, чтобы предохранить его от контакта с влажной землей.

Деревянные колья были заменены длинными стальными кольями, вбитыми глубоко в землю. Длинные винты идут через отверстия и надежно закрепляют трекер.

Было добавлено крепление, чтобы стабилизировать батареи и не допустить их хлопанья при сильном ветре.

Горизонтальная полоса поддержки была укреплена сваркой муфты 1/2 дюйма стальной трубы к главной однодюймовой несущей трубе. Два 24-дюймовые длинные куски 1/2 дюйма трубы затем образовали горизонтальную балку.

UPDATE – Старые конечные выключатели были заменены на новые герметичные для защиты от пыли и влаги.

UPDATE – Я сделал новую, защищенную от непогоды головку датчика для системы солнечного трекера. Теперь головка установлена в прозрачную пластиковую банку.

Панель затемнения в настоящее время находится на внешней стороне контейнера для простоты тонкой настройки отслеживания и крепится на месте простым хомутом. После того, как новая головка датчика будет установлена на системе слежения, силиконовый герметик по всему краю крышки банки защитит ее от влаги.

Вот вид головки датчика с удаленной банкой. Оригинальная головка имела два солнечных элемента, установленные под углом 90 градусов друг к другу. Такая конструкция не будет помещаться в этой банке, поэтому я установил элементы под более острым углом 60 градусов.

Эта фотография показывает нижнюю сторону головки датчика. Она также показывает, как монтажная опора навинчивается на крышку банки. Монтажная опора будет зажата на главном вале слежения с помощью хомута.




Солнечный трекер Radiofishka
Как известно, КПД солнечной панели максимально при попадании на нее прямых солнечных лучей. Но т.к. солнце постоянно движется по горизонту, то КПД солнечных батарей сильно падает, когда солнечные лучи падают на панель под углом. Чтобы повысить КПД солнечных панелей, применяются системы следящие за солнцем и автоматически поворачивающие солнечную панель для попадания прямых лучей.
В данной статье представлена схема устройства слежения за солнцем или по другому трэкер (Solar Tracker).
Схема трэкера проста, компактна и вы легко сможете собрать ее своими руками. Для определения позиции солнца, используются два фоторезистора. Мотор включен по схеме H-моста (H-bridge), который позволяет коммутировать ток до 500 мА при напряжении питания 6-15В. В темноте, устройство также работоспособно и будет поворачивать моторчик на наиболее яркий источник света.

Принципиальная схема устройства слежения за солнцем
Как видно на рисунке ниже, схема проста до безобразия и содержит микросхему операционного усилителя LM1458 (К140УД20), транзисторы BD139 (КТ815Г, КТ961А) и BD140 (КТ814Г,КТ626В), фоторезисторы, диоды 1N4004 (КД243Г), резисторы и подстроечные резисторы.

Из схемы видно, что мотор М приводится в движение при разных значениях на выходах ОУ IC1a и IC1b. Таблица истинности:
Низк. Выс. Вперед Выс. Выс. Остановлен Выс. Низк. Назад
или наоборот, зависит от подключения мотора
Транзисторы в схеме работают в паре, по диагонали, коммутируя +Ve или -Ve к мотору, и заставляя его вращаться вперед или назад.
Во время остановки мотора, он продолжает вращаться, т.к. присутствует вращающийся момент. Вследствие этого, мотор какое-то солнечный трекер своими руками время генерирует мощность, которая может вывести транзисторы из строя. Для защиты транзисторов от противоЭДС в схеме моста используется 4 диода.

Входной каскад состоит из двух ОУ (IC1) и фоторезисторов LDR и LDR’. Если количество света, попадающее на них одинаково, то сопротивления фоторезисторов также равны. Следовательно, если напряжение питания 12В, то в месте соединения фоторезисторов LDR LDR’ будет напряжение в 6В. Если количество света попадающего на один фоторезистор будет больше, чем на другом фоторезисторе, то напряжение будет изменяться.
Ограничения (лимиты) от +V до 0V устанавливаются четырьмя последовательно соединенными резисторами и подстраивается 2-мя подстроечными резисторами. Если напряжение выйдет за пределы этих ограничений, то ОУ запустит мотор и он постоянно будет вращаться.
Подстроечный резистор 20K регулируют чувствительность, т.е. диапазон между лимитами. Подстроечник 100К регулирует то, насколько лимиты будут симметричны относительно +V/2 (точка баланса).
1. Проверьте напряжение источника питания схемы
2. Подключите двигатель пост. тока
3. Установите фоторезисторы рядом, чтобы на них попадало одинаковое количество света.
4. Полностью выкрутите оба подстроечный резистора против часовой стрелки
5. Подайте питание на схему. Моторчик закрутиться
6. Вращайте подстроечник 100К по часовой стрелке до тех пор, пока он не остановится. Отметьте эту позицию.
7. Продолжайте вращать подстроечник 100К по часовой стрелке до тех пор, пока мотор не начнет вращаться в другую сторону. Отметьте эту позицию.
8. Разделите угол между двумя позициями пополам и установите там подстроечник (это будет точка баланса).
9. Теперь, вращайте подстроечник 20К по часовой стрелке до тех пор, пока мотор не начнет дергаться
10. Немного верните положение подстроечника назад (против часовой стрелки), чтобы мотор остановился (данный подстроечник отвечает за чувствительность)
11. Проверьте корректность работы схемы, поочередно заслоняя от света один и второй фоторезисторы.
Список радиоэлементов
Скачать список элементов (PDF)
 Поворотное устройство для солнечной батареи своими руками
Поворотное устройство для солнечной батареи своими руками
 Солнечный трекер своими руками! Пелинг Инфо солнечные
Солнечный трекер своими руками! Пелинг Инфо солнечные
 Устройство слежения за солнцем – Сайт Паяльник
Устройство слежения за солнцем – Сайт Паяльник
 Двухосевой солнечный трекер на Arduino / Geektimes
Двухосевой солнечный трекер на Arduino / Geektimes
Солнечный трекер Radiofishka
 10 способов необычно упаковать подарок своими руками Женский журнал
10 способов необычно упаковать подарок своими руками Женский журнал
 MC Church My City Church
MC Church My City Church

Солнечный трекер своими руками

Общая дисперсия света солнца, которая использовалась ранее, не давала отменного результата. Точнее сказать, тот результат, который человечество получало, нельзя было при всех его показателях назвать идеальным. Солнечные батареи устанавливались стационарно и пребывали в одном зафиксированном положении. Система слежения за солнцем сняла эту проблему.
Максимальная энергия, которую можно получить, будет генерирована в случае перпендикулярного направления солнечных лучей на плоскость батарей. В обратном случае эффективность солнечных батарей крайне мала – приблизительно 10-15%. Если использовать систему автоматического наведения батарей на солнце, можно повысить результат на 40%.
Как это работает
Устройство слежения состоит из двух важных частей: механизма, который осуществляет поворот и наклон батарей в нужную сторону и электронной схемы, которая приводит в действие механизм.
Расположение батарей определяется географической широтой местности, где они должны быть установлены. К примеру, нужно установить батареи в местности, которая соответствует 330 северной широты. Это значит, что ось устройства должна быть повернута на 330 по отношению к горизонту земли.
Само вращение возможно благодаря двигателем, работа которого регулируется автоматикой. Автоматика «следит» за местом расположения Солнца на небоскребе и по мере его продвижения в западном направлении дает сигнал двигателю делать поворот всех батарей.
Интересным и любопытным выдается тот факт, что питание для двигателя идет от самих солнечных батарей. Слежение за солнцем делает само солнце, а это тоже экономия средств.
Особенности конструкции
Для детального восприятия приведем пример, как использовались солнечные лучи батареями ранее. Например, солнечная батарея выполнена из двух панелей, каждая из которых содержит три элемента. Элементы соединены параллельно. Панели монтируются таким образом, чтобы между ними был прямой угол. В таком случае минимум одна панель в любом случае будет «впитывать» солнечные лучи.
Однокоординатный солнечный трекер ED-5000
Панели образуют угол в 900, биссектриса которого направлена строго на солнце. Если всю конструкцию повернуть на 450 вправо или влево, одна панель будет работать, вторая – бездействовать. Такая позиция использовалась для того, чтобы улавливать солнечные лучи одной батареей в первую половину дня, а во второй половине за дело принимается вторая батарея.
Однако с применением поворотного устройства автоматического слежения, можно навсегда забыть о проблемах расположения батарей. Теперь все они без исключения будут иметь обращенные под углом 900 поверхности к солнцу.
 Схема устройства
Схема устройства
Схема автоматического поворота должна также для большей эффективности работы учитывать наличие факторов, которые ограничивают энергию солнечных лучей. Нет смысла использовать питание в случае тумана, дождя или облачности, когда солнце спрятано полностью или частично.
Особенности устройства
Автоматические системы слежения промышленного производства более прогрессивны как в техническом плане, так и в эстетическом. Однако это вовсе не значит, что устройства, которые были изготовлены в домашних условиях, являются неполноценными. Они могут иметь некоторые недочеты, но в любом случае имеют высокий показатель.
 Двухкоординатный солнечный трекер
Двухкоординатный солнечный трекер
За что покупают и чем привлекает вся конструкция:
- Устройства не требуют компьютерной настройки и программного обеспечения;
- GPS-приемник считывает данные о местном времени, а также о местоположении;
- Легкий вес, что достигается использованием легких металлов (алюминий и его сплавы);
- Наличие коммуникационного порта дает возможность вовремя диагностировать неполадки в работе;
- Ременной привод, приводящий в действие механизм более надежный, чем шестеренный;
- GPS-приемник всегда обновляет данные о времени, так что сбой исключен – например, работа в ночное время невозможна;
- Любая конструкция требует минимального вмешательства со солнечный трекер своими руками стороны человека;
- Позволяют работать при любых возможных атмосферных влияниях, в том числе низких и высоких температур;
Возможность изготовления своими руками
Если есть возможности и желание, то всегда можно попробовать изготовить устройство самому. Конечно, это несколько тяжело, ведь потребуется не только глубокое знание и навыков в электромоделировании, но и дополнительные усилия для изготовления самой мачты, при монтаже солнечных батарей и т.п.
 Самодельный трекер
Самодельный трекер
Внимательно изучив форумы, можно смело заявлять о том, что есть профессионалы не промышленного уровня. В разных регионах (где это целесообразно и рентабельно) уже давно не диковинкой стало использование солнечных батарей при наличии поворотной системы слежения.
Разные мастера предлагают свои схемы, наработки, делятся опытом. Так что, если возникла потребность усовершенствовать конструкцию солнечных батарей и повысить производительность, всегда есть возможность сделать это самостоятельно, не задействовав при этом максимума финансовых средств.
Солнечный трекер представляет собой электронно-механическую систему, предназначенную для наведения солнечных панелей на Солнце. Система отслеживает положение Солнца на небосводе, и управляет сервоприводом, который поворачивает панели в соответствующем направлении. Применение подобного трекера позволяет получить максимальную производительность от солнечных батарей.
Большинство самодельных трекеров встречающихся в интернете собраны на Arduino, для определения положения Солнца используются фотодатчики. В зависимости от степени освещенности и взаимного расположения фотодатчиков, выполняется поворот в сторону наибольшего освещения. У такого способа имеются недостатки: неизвестно как поведет себя система в облачную погоду; низкая помехозащищенность в плане реагирования на лунный свет и яркие источники света, а также на отдельные облака.
Из-за наличия вышеперечисленных недостатков, я разработал свой вариант экономичного солнечного трекера на сервоприводах, обеспечивающего слежение за Солнцем по всей видимой области неба в любое время, независимо от географического местоположения.
Метод слежения за Солнцем
Положение Солнца на небе можно определить не только по освещенности фотодатчиков, но и по формулам небесной механики исходя из географических координат точки наблюдения и точного времени. Сейчас будет много определений и формул, относящихся к небесной механике, так что приготовьтесь напрячь извилины). Для наведения солнечных панелей нужно определить горизонтальные координаты Солнца, это высота и азимут. Центр данной системы координат совпадает с местонахождением наблюдателя, расчеты ведутся относительно плоскости математического горизонта.
Высота h – это угол между плоскостью мат. горизонта и направлением на светило, отсчитывается от 0⁰ до +90⁰ к зениту, и от 0⁰ до -90⁰ к надиру.
Азимут A – угол между полуденной линией (грубо говоря, направление на юг) и линией пересечения плоскости мат. горизонта с плоскостью вертикального круга светила. Отсчитывается от точки юга в сторону суточного вращения небесной сферы в пределах 0⁰…360⁰, или от 0⁰ до +180⁰ к западу и от 0⁰ до −180⁰ к востоку. Горизонтальные координаты светила постоянно изменяются, вследствие суточного вращения Земли.
Ниже приведены формулы для вычисления высоты и азимута светила:
h = asin (sinδ ∙ sinϕ + cosδ ∙ cosϕ ∙ cost);
A = atan2 (cosδ ∙ sint , cosδ ∙ sinϕ ∙ cost – sinδ ∙ cosϕ),
где δ – склонение светила, t – часовой угол светила, ϕ – широта точки наблюдения (0⁰…+90⁰ для северного полушария, 0⁰…-90⁰ для южного, 0⁰ – экватор).
Расшифровка функции atan2(y, x):
Как видно для расчета горизонтальных координат, необходимо вычислить склонение и часовой угол светила. Эти координаты относятся к первой экваториальной системе координат, где основной плоскостью является плоскость небесного экватора.
Склонение δ – угол между плоскостью небесного экватора и направлением на светило, отсчитывается от 0⁰ до +90⁰ в сторону северного полюса, и от 0⁰ до -90⁰ в сторону южного полюса.
Часовой угол t – двухгранный угол между плоскостью небесного меридиана и кругом склонения светила. Отсчитывается в сторону суточного вращения небесной сферы, к западу от верхней точки небесного экватора, в пределах 0⁰…360⁰, или от 00:00 до 24:00 (в часовой мере). Также часовой угол может измеряться в пределах от 0⁰ до 180⁰ (от 00:00 до 12:00) к западу и от 0⁰ до −180⁰ (от 00:00 до -12:00) к востоку. Часовой угол равен 0 в момент верхней кульминации светила, для Солнца в истинный полдень (не всегда совпадает с моментом времени, когда часы показывают 12:00 по местному времени).
Склонение Солнца изменяется в течение года (неравномерно) от -23,43⁰ до +23, 43⁰, вследствие орбитального движения Земли вокруг Солнца, и не связано с суточным вращением Земли. Определить склонение Солнца для любого дня года, проще всего из таблицы средних значений склонения за 4-х летний цикл. Таблицу можно скачать в конце статьи.
Часовой угол светила изменяется в течение суток (вследствие суточного вращения Земли), его можно вычислить, зная истинное солнечное время:
t = Tс.ист – 12:00ч, (-12:00…+11:59),
где Tс.ист – истинное солнечное время (00:00…23:59ч).
Истинное солнечное время можно вычислить, зная местное время, часовой пояс и долготу точки наблюдения:
Tс.ист = Tс.ср + EOT, или Tс.ист = UTC + λ + EOT,
где Tс.ср – среднее солнечное время в некоторой точке на Земле (зависит от долготы точки), UTC – всемирное координированное время, λ – долгота точки наблюдения в часовых единицах, EOT – уравнение времени.
Всемирное координированное время можно вычислить из местного времени (Tм) и часового пояса (N): UTC = Tм – N. Долгота местоположения λ отсчитывается от 0⁰ до 180⁰ к востоку от нулевого меридиана (восточная долгота), и от 0⁰ до -180⁰ к западу (западная долгота). При подстановке в вышеприведенную формулу, долготу нужно перевести в часовые единицы (1⁰ = 4 мин).
Уравнение времени EOT показывает разницу между средним солнечным временем и истинным солнечным времени, так как суточное движение Солнца неравномерно, вследствие эллиптичности орбиты Земли, а также наклона земной оси к плоскости эклиптики:
EOT = 9,87 ∙ sin2B – 7,53 ∙ cosB – 1,5 ∙ sinB,
где B = (360⁰ (N-81))/365, N – порядковый номер дня в году.
Таким образом, в течение года значение уравнения времени изменяется от -14,3 мин до +16,4 мин.
Ниже представлен график изменения уравнения времени в течение года: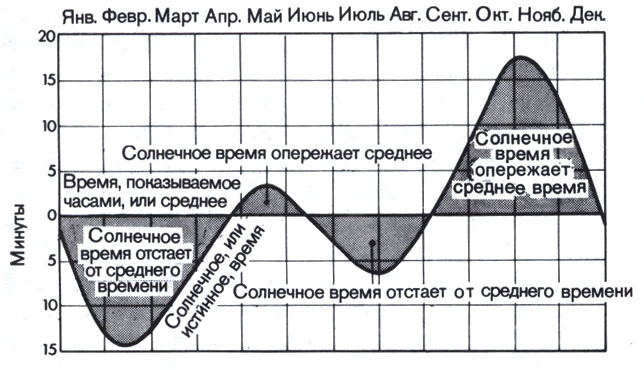
Мне предстояло загнать все эти расчеты в программу микроконтроллера, я не рискнул писать на ассемблере, поэтому стал изучать СИ, пришлось неделями возиться с формулами и расчетами, для получения правильного результата, попутно изучая СИ. В итоге мне удалось написать рабочую программу, при этом погрешность вычислений не превышает ±1⁰.
Описание схемы солнечного трекера
Солнечный трекер задумывался под небольшую солнечную батарею мощностью 2Вт и напряжением 6В, для заряда литий-ионного аккумулятора, но лучше использовать более мощную батарею не менее 4Вт. В качестве электроприводов я использовал сервоприводы MG996R (купить можно в Китае, ссылка приведена в конце статьи). Дополнительно приобрел специальные кронштейны для сборки альт-азимутальной установки (ссылка для заказа в конце статьи). Собранная конструкция позволяет ориентировать солнечную батарею по высоте и азимуту, сервопривод азимута при этом стоит неподвижно и вращает сервопривод высоты вместе с кронштейнами.
Ниже представлена схема солнечного трекера:![]()
Схема построена на микроконтроллере PIC16F876A, который обладает значительным объемом памяти, и содержит множество периферийных модулей. Вся конструкция питается от Li-ion аккумулятора, который соответственно заряжается от солнечной батареи через модуль, на основе микросхемы TP4056, это специализированный контроллер заряда Li-ion аккумуляторов (ссылка для заказа в конце статьи). Для определения текущего времени и даты, в схеме используется модуль (ссылка для заказа в конце статьи). Часы достаточно точные, уход времени составляет ±2 минуты в год, я уже писал подробную статью о них, желающие могут ознакомиться. Для отображения параметров используется цифровой индикатор на (ссылка для заказа в конце статьи).
Максимальное напряжение на Li-ion аккумуляторе не превышает 4,1В, что недостаточно для питания сервоприводов, поэтому в схему добавлен повышающий модуль на основе микросхемы MT3608 (ссылка для заказа в конце статьи). Минимальное входное напряжение модуля 2В, максимальный ток нагрузки 2А, на модуле имеется многооборотный переменный резистор для настройки выходного напряжения. Для экономии энергии, питание на сервоприводы подается не постоянно, а только для изменения положения вала. Питание коммутируется с помощью p-канального полевого транзистора VT1, модуль преобразователя также управляется от микроконтроллера.
На плате модуля не предусмотрен контакт для управления, поэтому необходимо дополнительно подпаять провод к 4-му выводу микросхемы MT3608, это вход вкл/выкл преобразователя. На плате этот вывод подключен к “+” питания, предварительно нужно обрезать дорожки подходящие к этому выводу (для этого придется выпаять микросхему), либо приподнять вывод над платой. На плате модуля установлен чип резистор делителя напряжения, увеличение сопротивления этого резистора также уменьшит потребление в спящем режиме, я заменил его на другой, с сопротивлением 9,1 кОм, изначально стоял на 2,2 кОм. После замены нужно выставить выходное напряжение примерно на 5-5,5В для питания сервоприводов, рисунок ниже:
Модуль часов также необходимо доработать, для снижения энергопотребления нужно выпаять микросхему памяти 24c32, светодиод “POWER”, а также резистор (200 Ом), через который внешнее напряжение питания подается на батарейку, зачем китайцы так сделали, остается непонятным, ведь батарейка не предназначена для заряда, см. рисунок ниже:
Светодиод HL1 установлен для индикации ошибки связи с часами DS3231 (по интерфейсу I2C), светодиод начинает мигать, если нет ответа от часов.
Сборка и настройка солнечного трекера
Сборку альт-азимутальной установки следует начинать, когда сервоприводы установлены в среднее положение, это происходит при первом включении устройства, на индикаторе при этом высвечивается надпись “Cent”. Сервопривод азимута желательно закрепить на пластине, которая будет служить основанием установки, либо на стойке, так чтобы выходной вал был направлен вертикально вверх. Далее необходимо прикрепить кронштейн сервопривода высоты, сначала нужно прикрутить к кронштейну втулку скольжения, затем переходную муфту. Кронштейн нужно выставить перпендикулярно длинной стороне сервопривода азимута, как показано на фото: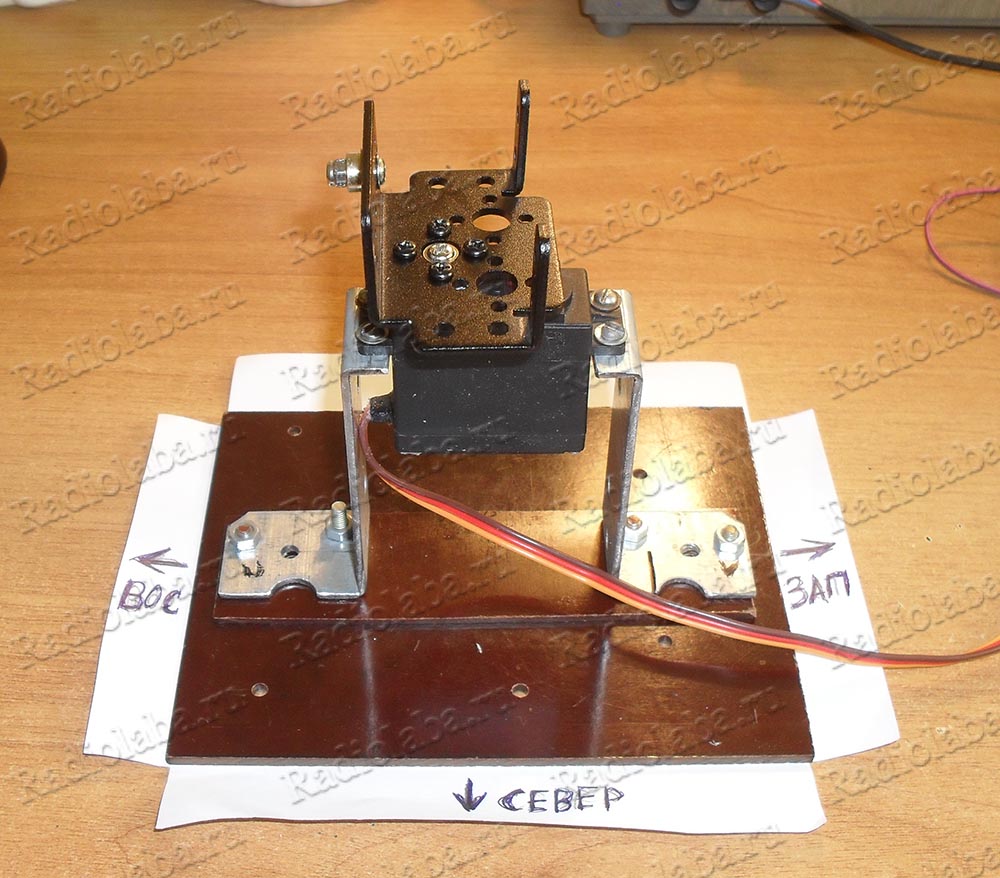
При сборке трудно достичь перпендикулярного положения, но это не обязательно, допустимы отклонения в пределах ±5-10 градусов. В дальнейшем программная корректировка устранит это отклонение.
После закрепления сервопривода высоты остается прикрутить несущий кронштейн, сначала примеряем переходную муфту на вал сервопривода, выбираем такое положение, чтобы несущий кронштейн после установки был направлен вертикально вверх. Опять же не обязательно выставлять точное положение, как я уже говорил ранее. Общий вид установки представлен на следующем фото: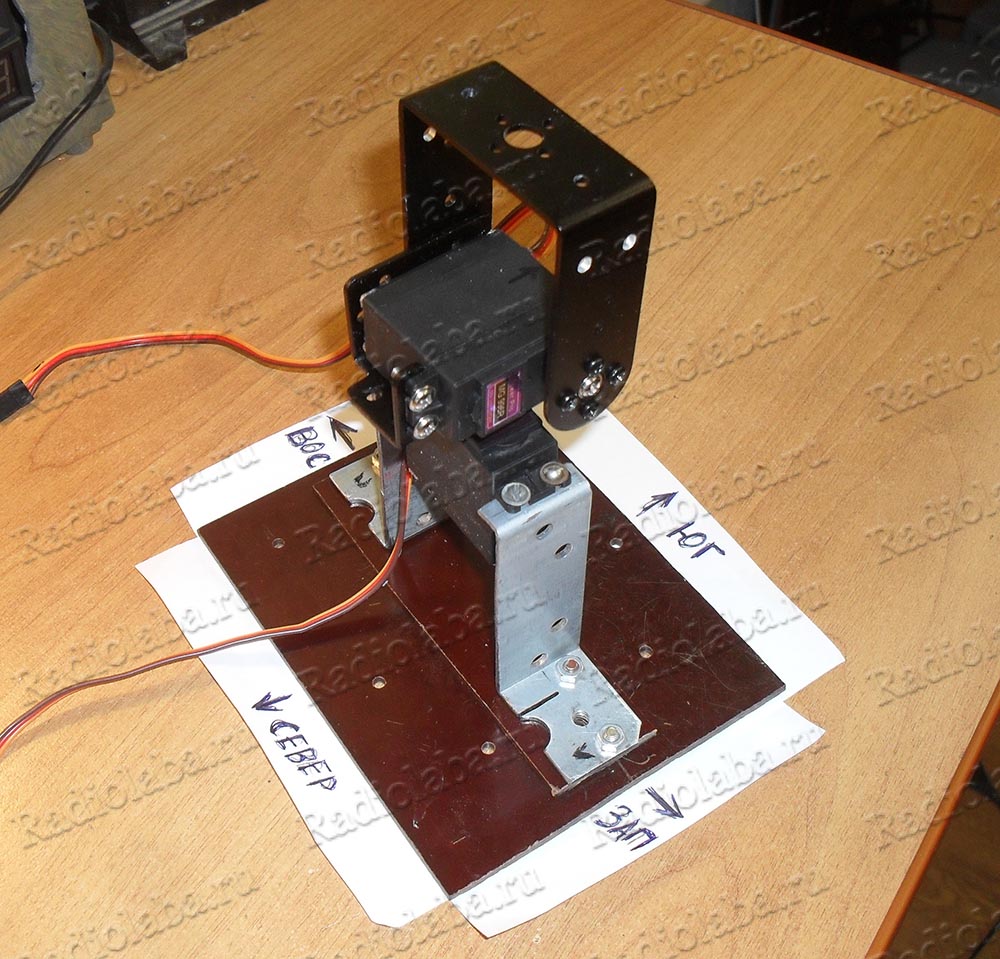
Далее следует процедура корректировки крайних положений сервоприводов. Настройку следует выполнять на ровной поверхности, когда вал сервопривода по азимуту, расположен вертикально (ось вращения направлена по отвесной линии). После нажатия кнопки “Ввод” несущий кронштейн поворачивается в сторону условного Севера и принимает горизонтальное положение (на индикаторе высвечивается надпись “north”):
Если имеется отклонение от горизонтали, то нужно подрегулировать положение кронштейна кнопками “Уст” и “Разряд”. Таким образом, происходит настройка крайнего положения сервопривода. Далее при нажатии кнопки “Ввод”, кронштейн поворачивается в сторону условного Юга (на индикаторе надпись South). При необходимости отрегулируйте горизонтальное положение кронштейна, как описано выше.
Дальнейшее нажатие кнопки “Ввод” приведет к повороту кронштейна в сторону условного Востока (на индикаторе надпись EASt). Кнопками “Уст” и “Разряд” корректируют направление, при этом удобно ориентироваться на корпус сервопривода азимута, нужно чтобы кронштейн был направлен по длинной стороне корпуса, если смотреть сверху:
При следующем нажатии кнопки “Ввод”, кронштейн повернется в сторону Запада (на индикаторе надпись WESt), корректировка выполняется вышеописанным способом.
В результате корректировки, поворот кронштейна по высоте и азимуту выполняется в пределах 180⁰, значения корректировок сохраняются в EEPROM памяти микроконтроллера. После нажатия кнопки “Ввод”, кронштейн примет скорректированное направление на условный Юг. Для правильной ориентации солнечной батареи, направление на условный Юг должно указывать на реальную точку Юга в данной местности, а вал сервопривода по азимуту расположен вертикально по отвесной линии.
После очередного нажатия кнопки “Ввод”, следует настройка времени, даты, часового пояса, координат местоположения, длительности спящего режима. Соответственно для каждого параметра на индикаторе высвечиваются следующие надписи:
– местное время, по умолчанию 0 ч. 0 мин;
– долгота местоположения, по умолчанию -0 град. 0 мин. (для западной долготы ставится знак минус “-”);
– широта местоположения, по умолчанию -0 град. 0 мин. (для южной широты ставится знак минус “-”);
– часовой пояс, по умолчанию -0, (для западной долготы ставится знак минус “-”);
– длительность спящего режима, по умолчанию 1 мин.
Кнопками “Разряд” и “Уст” выставляют значения параметров, при нажатии кнопки “Ввод”, значения времени, и даты записываются в , остальные параметры сохраняются в EEPROM памяти микроконтроллера. После ввода всех параметров, на индикаторе высвечивается надпись SUCCES (в течение 1 сек, затем индикатор гаснет), далее установка наводится на Солнце, согласно введенным параметрам.
Для экономии энергии, наведение на Солнце выполняется через определенный промежуток времени, который задается в параметре длительность спящего режима. После наведения сервоприводы обесточиваются, микроконтроллер переходит в спящий режим, общее потребление трекера снижается до 160 мкА. Длительность “сна” можно задать в пределах 1-255 мин.
При повторном включении трекера (после отключения питания), сначала проверяется EEPROM память, если сохраненные параметры корректны, трекер продолжает слежение за Солнцем, при этом цифровой индикатор остается в спящем режиме и не включается, для экономии энергии. Можно вообще отключить питание индикатора после первоначального ввода параметров. Для повторного входа в режим корректировок, нужно удерживать кнопку “Уст” и подать питание на трекер. Если параметры, считанные из EEPROM, неверные или отсутствуют, также произойдет переход в режим корректировок.
Я дополнительно добавил в программу микроконтроллера функцию вывода основных параметров по интерфейсу UART. После вычисления местоположения Солнца, микроконтроллер передает текущее значение времени, даты, порядковый номер дня, координаты местоположения, введенные при настройке, а также текущие значения высоты и азимута Солнца. Каждый параметр начинается с символа “$” и заканчивается символами “\r”, “\n”. Эти данные можно посмотреть на компьютере, подключив трекер через USB-UART переходник. В настройках терминальной программы нужно установить следующие настройки: cкорость передачи 9600 бит/сек, 8 бит данных, один стоповый бит. Ниже представлен скриншот с терминальной программы:![]()
Сервоприводы MG996R не защищены от попадания влаги внутрь корпуса, поэтому в случае наружного применения сервоприводы следует загерметизировать. Нужно отвернуть четыре болта с нижней стороны корпуса, и нанести нейтральный силиконовый герметик между стыками корпуса, также следует нанести герметик вокруг манжеты для ввода проводов в корпус. На шестерни редуктора можно дополнительно нанести смазку, так как заводская практически отсутствует. По отзывам, лучше всего подходит смазка ШРУС-4, в отличие от литола, она не замерзает на холоде. Для герметизации верхнего отверстия, на выходной вал можно надеть силиконовое кольцо, при этом нужно снять фаску с переходной муфты, которая устанавливается на вал, чтобы не создавать избыточного трения.
К несущему кронштейну я прикрепил прямоугольную текстолитовую пластину, на которую с помощью двухстороннего скотча приклеил солнечную батарею. Так как большую часть времени сервоприводы обесточены, то возможен поворот вала по высоте под действием тяжести солнечной батареи. Чтобы избежать этого, я прикрепил по бокам несущего кронштейна длинные противовесы, изготовленные из уголков и пластин. Изменяя массу противовесов, я сбалансировал конструкцию по оси вращения высоты.
Трекер выполняет наведение, когда Солнце находится над горизонтом, то есть когда его высота больше 0⁰. Когда Солнце заходит за горизонт (отрицательное значение высоты), трекер направляет солнечную батарею на Восток, дальнейшее слежение возобновляется с восходом Солнца. Слежение выполняется по всей видимой области неба.
Суточное движение Солнца и звезд, можно посмотреть на компьютере в программе Stellarium, это свободный виртуальный планетарий, который отображает реалистичное звездное небо. Программа отображает движение светил по небосводу, можно посмотреть положение Солнца и звезд на любой момент времени, также доступны данные о всевозможных координатах.
Я смонтировал устройство на печатной плате, которую разработал под размеры корпуса GAINTA G1202G. На плате имеется место под джампер (перемычку), с помощью которого можно отключать питание цифрового индикатора.
Полевой транзистор VT1 можно заменить на IRLML2244, IRLML6402. Также можно использовать транзисторы в корпусе SOIC-8 (придется переделать плату): IRF9332, IRF9310, IRF9317.
При отрицательных температурах Li-ion аккумуляторы теряют значительную емкость (происходит замерзание электролита), использовать аккумуляторы при температурах ниже +5 ⁰C не рекомендуется, так как это приводит к преждевременному сокращению ресурса. Поэтому если планируется эксплуатировать трекер в морозную погоду, то лучше использовать литий-железно-фосфатный аккумулятор LiFePO4. Аккмуляторы такого типа более морозостойкие, диапазон рабочих температур от -30 ⁰C до +55 ⁰C, максимальное напряжение 3,65В, минимальное 2В, среднее 3,3В, то есть ниже чем у Li-ion. Также к преимуществам можно отнести стабильное напряжение разряда, близкое к 3,2В. В конце статьи приведены ссылки для заказа аккумулятора, а также на модуль для заряда.
На основе солнечного трекера можно создать небольшую автономную систему, которая не требует внешнего питания, например удаленная метеостанция, или охранная система для дачи,и т.д. Можно заменить сервоприводы на более мощные, и установить солнечную панель побольше. Можно приспособить схему для солнечных панелей на 12, 18В, для заряда нескольких последовательно соединенных аккумуляторов, но для этого придется изменить схему, и использовать другие модули заряда.
Ниже представлены ссылки для заказа модулей и комплектующих для сборки солнечного трекера:
Солнечная батарея 6В 4,5Вт
Модуль часов реального времени DS3231
Цифровой индикатор на драйвере MAX7219
Модуль заряда Li-ion аккумулятора на TP4056
Аккумулятор LiFePO4 6500mah
Аккумулятор LiFePO4 1800mah
Модуль заряда LiFePO4 аккумулятора
Сервопривод MG996R
Кронштейны для сборки альт-азимутальной установки под сервоприводы MG996R
Повышающий преобразователь на MT3608
![]()
![]()
![]()
![]()
![]()
![]()
Как известно, КПД солнечной панели максимально при попадании на нее прямых солнечных лучей. Но т.к. солнце постоянно движется по горизонту, то КПД солнечных батарей сильно падает, когда солнечные лучи падают на панель под углом. Чтобы повысить КПД солнечных панелей, применяются системы следящие за солнцем и автоматически поворачивающие солнечную панель для попадания прямых лучей.
В данной статье представлена схема устройства слежения за солнцем или по другому трэкер (Solar Tracker).
Схема трэкера проста, компактна и вы легко сможете собрать ее своими руками. Для определения позиции солнца, используются два фоторезистора. Мотор включен по схеме H-моста (H-bridge), который позволяет коммутировать ток до 500 мА при напряжении питания 6-15В. В темноте, устройство также работоспособно и будет поворачивать моторчик на наиболее яркий источник света.
Принципиальная схема устройства слежения за солнцем
Как видно на рисунке ниже, схема проста до безобразия и содержит микросхему операционного усилителя LM1458 (К140УД20), транзисторы BD139 (КТ815Г, КТ961А) и BD140 (КТ814Г,КТ626В), фоторезисторы, диоды 1N4004 (КД243Г), резисторы и подстроечные резисторы.

Из схемы видно, что мотор М приводится в движение при разных значениях на выходах ОУ IC1a и IC1b. Таблица истинности:
* или наоборот, зависит от подключения мотора
Транзисторы в схеме работают в паре, по диагонали, коммутируя +Ve или -Ve к мотору, и заставляя его вращаться вперед или назад.
Во время остановки мотора, он продолжает вращаться, т.к. присутствует вращающийся момент. Вследствие этого, мотор какое-то время генерирует мощность, которая может вывести транзисторы из строя. Для защиты транзисторов от противоЭДС в схеме моста используется 4 диода.

Входной каскад состоит из двух ОУ (IC1) и фоторезисторов LDR и LDR". Если количество света, попадающее на них одинаково, то сопротивления фоторезисторов также равны. Следовательно, если напряжение питания 12В, то в месте соединения фоторезисторов LDR LDR" будет напряжение в 6В. Если количество света попадающего на один фоторезистор будет больше, чем на другом фоторезисторе, то напряжение будет изменяться.
Ограничения (лимиты) от +V до 0V устанавливаются четырьмя последовательно соединенными резисторами и подстраивается 2-мя подстроечными резисторами. Если напряжение выйдет за пределы этих ограничений, то ОУ запустит мотор и он постоянно будет вращаться.
Подстроечный резистор 20K регулируют чувствительность, т.е. диапазон между лимитами. Подстроечник 100К регулирует то, насколько лимиты будут симметричны относительно +V/2 (точка баланса).
Настройка схемы:
1. Проверьте напряжение источника питания схемы
2. Подключите двигатель пост. тока
3. Установите фоторезисторы рядом, чтобы на них попадало одинаковое количество света.
4. Полностью выкрутите оба подстроечный резистора против часовой стрелки
5. Подайте питание на схему. Моторчик закрутиться
6. Вращайте подстроечник 100К по часовой стрелке до тех пор, пока он не остановится. Отметьте эту позицию.
7. Продолжайте вращать подстроечник 100К по часовой стрелке до тех пор, пока мотор не начнет вращаться в другую сторону. Отметьте эту позицию.
8. Разделите угол между двумя позициями пополам и установите там подстроечник (это будет точка баланса).
9. Теперь, вращайте подстроечник 20К по часовой стрелке до тех пор, пока мотор не начнет дергаться
10. Немного верните положение подстроечника назад (против часовой стрелки), чтобы мотор остановился (данный подстроечник отвечает за чувствительность)
11. Проверьте корректность работы схемы, поочередно заслоняя от света один и второй фоторезисторы.
В мире есть множество вещичек, делающих жизнь проще. Система слежения за солнцем (или трэкер, Solar Tracker) – одна из них. Главный недостаток батарей, работающих от солнечной энергии – их КПД заметно падает, если солнечные лучи падают на панель не под прямым углом. Использование трэкера поможет справиться с этой проблемой. Благодаря этому нехитрому устройству, всегда будет повернута к солнечным лучам под оптимальным углом.
Рассмотрим схему устройства слежения за солнцем. Она проста, включает минимум элементов, что не может не радовать начинающих радиолюбителей. Каждый сможет собрать ее своими руками.
Позицию солнца отслеживают два фоторезистора. Трэкер может работать и в темноте – моторчик, включенный по схеме H-моста (H-bridge) и рассчитанный на напряжение 6 – 15 В, ток – до 0,5 А, поворачивает устройство на источник света.
Общий вид системы слежения за солнцем:

Описание принципиальной схемы системы слежения за солнцем:
Принципиальная схема устройства по слежению за солнцем включает в себя следующие элементы: фоторезисторы, 4 диода 1N4004 (КД243Г), резисторы, подстроечные сопротивления, транзисторы BD140 (КТ814Г, КТ626В) и BD139 (КТ815Г, КТ961А), операционный усилитель LM1458 (К140УД20).

Из схемы видим, что мотор М включается при разности значений на выходах ОУ IC1a и IC1b.
Таблица истинности:
* либо наоборот, зависит от включения мотора.
Двигатель приводится в движение транзисторами, работающими в паре, по диагонали, и передающими сигнал +Ve или –Ve мотору. При остановке мотора, он не останавливается мгновенно. Этому препятствует вращающий момент, кроме того способствующий генерированию мощности. Чтобы противоЭДС не привела транзисторы к поломке, в схеме задействован диодный мост.

Входной каскад построен на фоторезисторах LDR и LDR’ и паре операционных усилителей ОУ (IC1). Если оба фоторезистора получают одинаковый по силе поток солнечных лучей, сопротивление фоторезисторов также имеет одинаковую величину. При этом напряжение на входе равно 12 В, в точке соединения фоторезисторов – 6В. Если световой поток, получаемый фоторезисторами, неодинаков, сопротивление их будет различно, следовательно, напряжение тоже изменится.
В схеме присутствуют ограничения (лимиты) от +V до 0V, реализованные посредством 4-х резисторов (включены последовательно), подстраиваемых парой подстроечных резисторов:
- 100К регулирует симметричность лимитов относительно точки баланса +V/2;
- 20К регулирует диапазон между лимитами (чувствительность).
Настройка схемы устройства, следящего за солнцем:
- Измерьте напряжение источника питания
- Подключите ДПТ.
- Расположите фоторезисторы рядом (световой поток на обоих должен быть одинаковым).
- Выкрутите подстроечные резисторы против часовой стрелки (полностью).
- Подайте напряжение на схему. Если схема собрана верно, двигатель начнет работать.
- Поверните подстроенный резистор 100К по часовой стрелке до его остановки. Отметьте эту позицию.
- Продолжите вращение 100К до тех пор, пока мотор не войдет в реверс. Отметьте эту позицию.
- Установите подстроечный резистор (100К) в среднее положение (между двумя отмеченными ранее позициями). Это будет точка баланса.
- Вращайте подстроечный резистор 20К (отвечает за чувствительность) по часовой стрелке, пока двигатель не начнет дергаться.
- Верните положение 20К немного назад. Мотор должен остановиться.
- Поочередно заслоняйте рукой фоторезисторы, чтобы проверить правильность работы схемы.
 Творожное печенье «уголки Уголки из творога рецепт
Творожное печенье «уголки Уголки из творога рецепт Гадание Стрела Судьбы по принципу «да» или «нет
Гадание Стрела Судьбы по принципу «да» или «нет Как готовить из печени салат слоями
Как готовить из печени салат слоями